Design Build Fly 2018
Overview
The Design Build Fly (DBF) competition is an annual AIAA-sponsored challenge to design, build, and fly a remote-controlled aircraft that completes a set of mission requirements. For the 2018 mission our team had to:
- Independently drop multiple "bombs"
- Spin a radome at a specified RPM
- Fold wings to fit through a small box (takeoff box constraint)
- Take off from a short (~10 ft), slightly inclined ramp
I served as electronics team lead for the University of Texas at Dallas team — our first year competing (while UT Austin had many prior years of experience).
Test Stand & Propulsion Characterization
We built a test stand using an Arduino Uno to measure voltage, current, thrust, and throttle position. Data was logged via serial to a computer. A hall-effect current sensor was used for high-current measurements and a voltage divider scaled battery voltage into the ADC range.
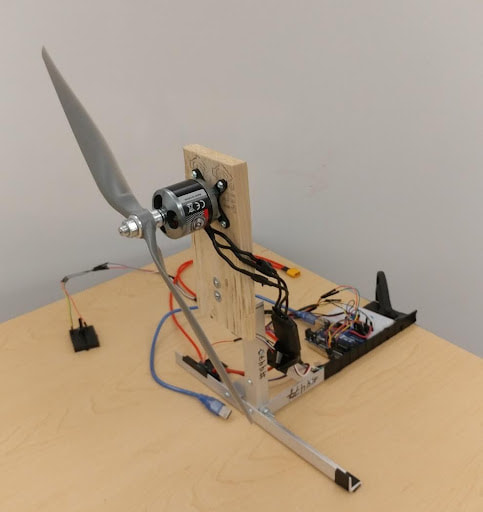 Test stand measuring current, voltage, thrust, and throttle position
Test stand measuring current, voltage, thrust, and throttle position
Duration testing confirmed battery capacity was sufficient for the full mission profile. Thrust gradually decreased as battery voltage sagged.
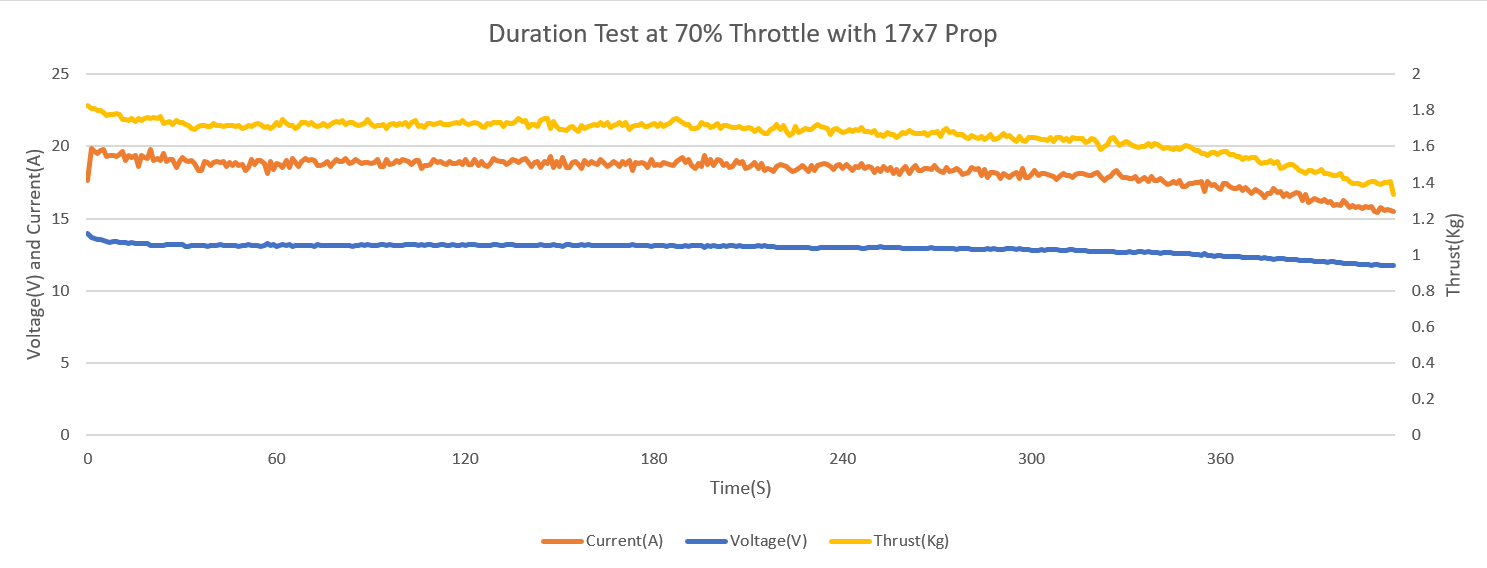 Duration test — thrust tapers as voltage drops
Duration test — thrust tapers as voltage drops
Maximum thrust tests (different propellers) were used together with aerodynamic calculations to verify takeoff performance from the short ramp.
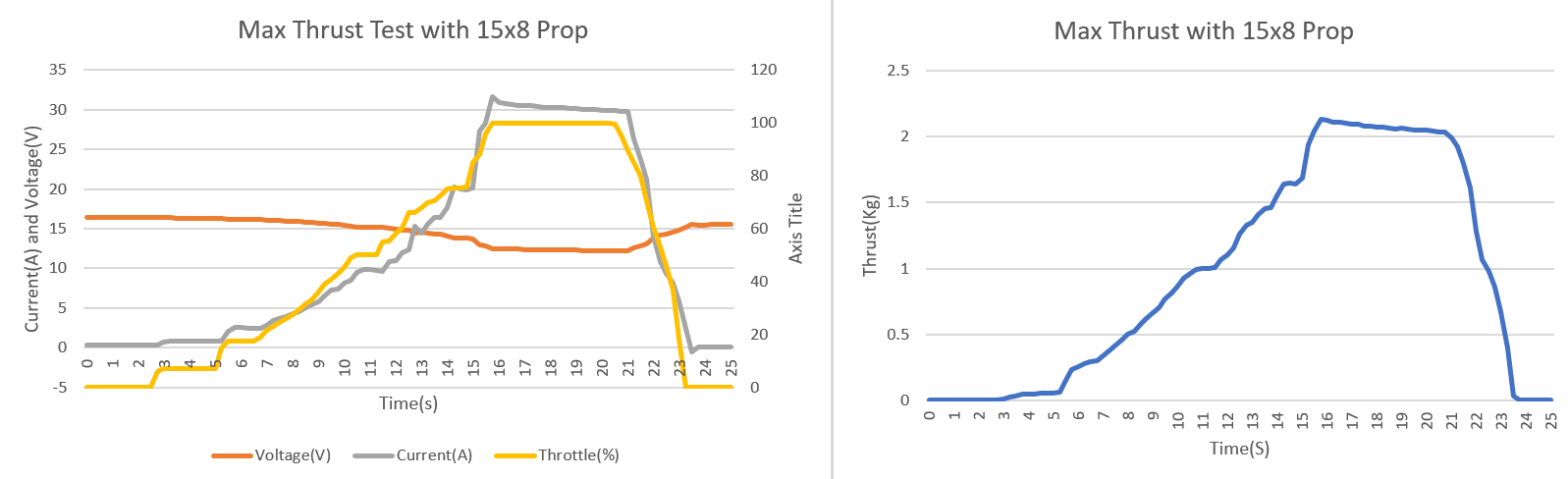 Max thrust characterization for takeoff performance
Max thrust characterization for takeoff performance
Electrical System Architecture
The block diagram below shows the power distribution, fusing, high-current paths, and control signal routing for the entire aircraft.
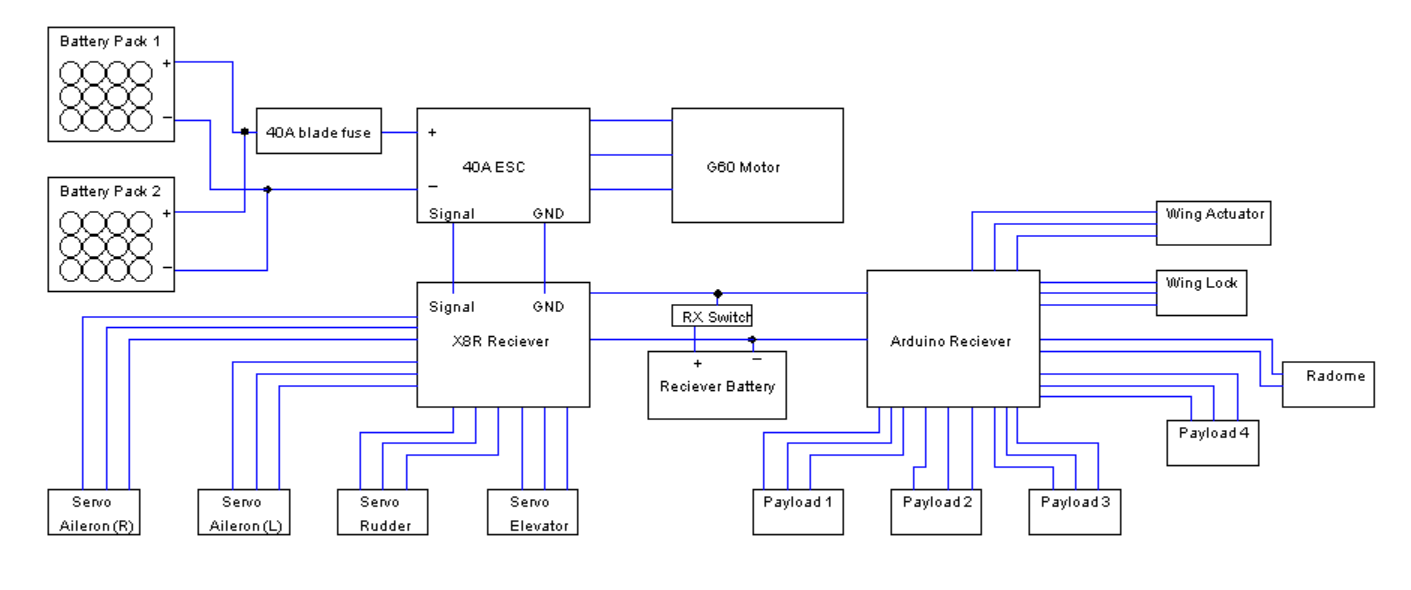 Complete electrical system block diagram
Complete electrical system block diagram
Payload & Actuation Electronics
An early prototype payload board used an nRF24L01 module to receive commands for bomb release and radome spin-up. Servos handled bomb dropping; a modified (higher gear ratio) servo drove the radome. Later revisions added an LDO regulator to supply stable power to the servos and motor.
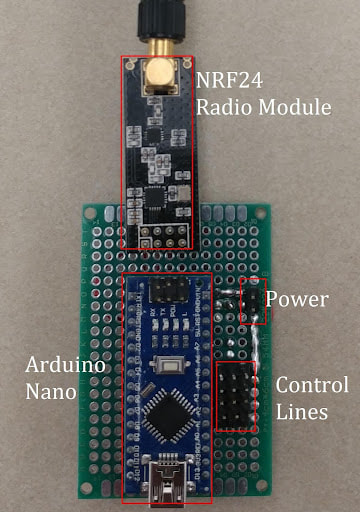 Preliminary nRF24-based payload control PCB (bomb drop + radome actuation)
Preliminary nRF24-based payload control PCB (bomb drop + radome actuation)